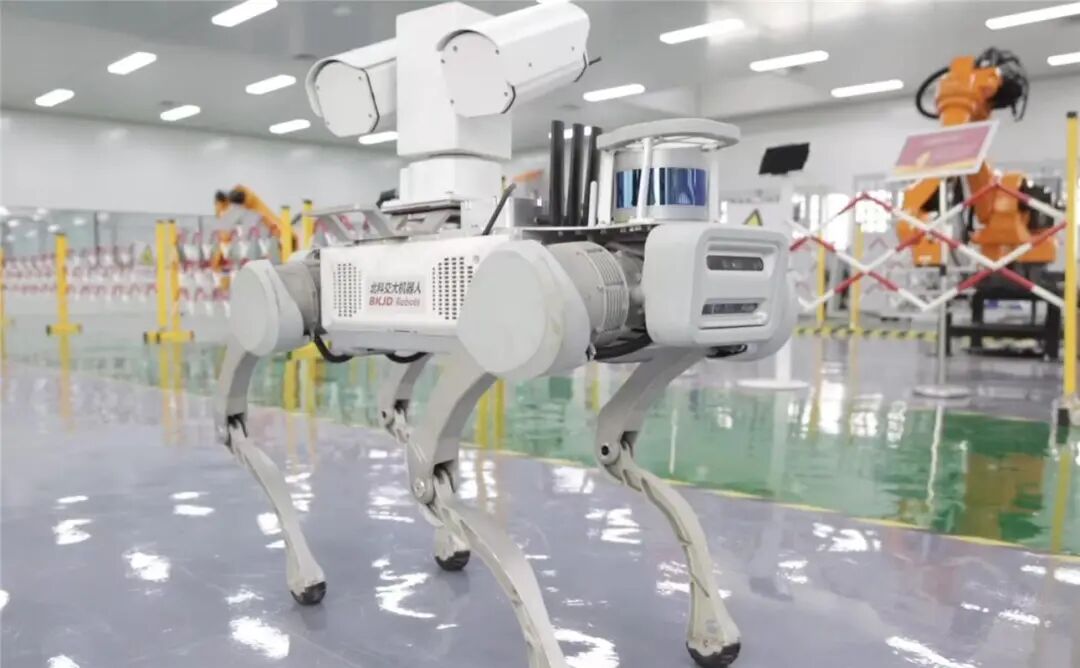
走进内蒙古第一机械集团有限公司工艺研究所试验现场,一幕极具未来感的画面映入眼帘:安全区内,试验人员双手灵巧地操控着手部外骨骼;危险工位上,机器人同步复刻着每一个细微动作,分毫不差。近日,内蒙古第一机械集团有限公司与浙江大学联合研发的灵巧遥操作机器人项目顺利完成,成功实现机器人替代人工进行弹药装配,从技术源头为涉危涉火作业筑起了一道坚实的安全防线。
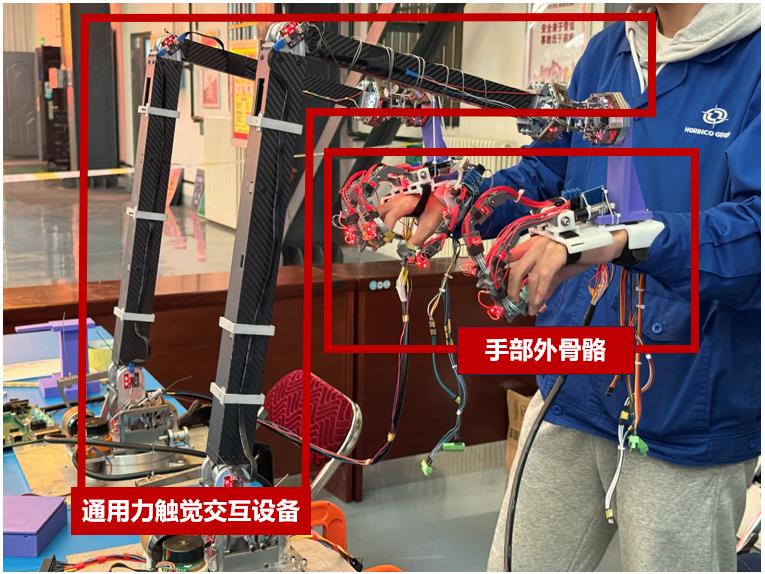 试验人员正在操作灵巧遥操作机器人手部外骨骼。
试验人员正在操作灵巧遥操作机器人手部外骨骼。
长期以来,弹药装药等环节如同“在雷区跳舞”——作业人员需近距离手工作业,安全风险极高。针对这类高危场景对操作精度和临场感的苛刻要求,研发团队构建起“动作捕捉—多模切换—力觉反馈”的全链路技术系统。自主研发的六自由度力触觉交互设备可完整捕捉人手整体运动,手部外骨骼则能精细还原手指姿态与各关节角度;匹配的核心软件框架ToM支持多种遥操作架构在线切换,作业人员可根据不同装配任务灵活调用。从指尖姿态到关节角度,操作者的手部动作被完整映射至终端机器人,在复杂狭小空间内实现精准作业。
 工作人员正在操控灵巧遥操作机器人。
工作人员正在操控灵巧遥操作机器人。
“这套系统更为关键的是,末端集成的实时压力感知与精准控制模块,可将装配接触力实时反馈至主端,并以匹配的力触觉刺激作用于作业人员手指,形成‘力觉临场’闭环。”项目团队研发人员杨帆介绍说。在弹药装配测试中,团队成功将作业人员对不同装药量下硝基垫片装配压紧的经验数据化,融入控制系统,实现了人机协同的高精度装配。
据了解,此次研发的灵巧遥操作机器人可直接应用于特种车辆测试弹药装配、涉火涉危操作等各类危险场景,技术适配性强,产业化前景广阔。研发团队表示,这一技术不仅彻底实现了人机隔离,还增强了作业数据的采集分析能力,为危险作业智能化、安全化升级提供了坚实的技术支撑。
(来源:草原云)
(责任编辑:曹靖宇;值班主任:张燕青;一审:张飞;二审:贾星慧;三审:王睿)